Prótesis de brazo impreso en 3D con Arduino
El presente proyecto fue realizado en grupo por mí y un compañero de la carrera, David Alejandro Acosta Lara para la materia de Introducción a la Mecatrónica, con la guía del Msc. Jonathan León.
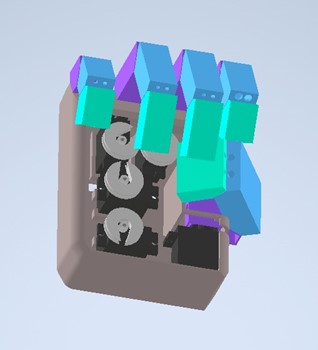
El objetivo de este proyecto fue realizar una prótesis para una persona con algún tipo de discapacidad, motivo por el cual decidimos hacer la prótesis de mano impresa en 3D.
El material utilizado para la impresión es PLA, se usó micro servomotores y Arduino para el control de este. El proyecto fue realizado en el Periodo Académico Ordinario I - 2023.
Se usó la metodología de Design Thinking durante el transcurso de este proyecto para que el resultado final sea pensado para el usuario como lo necesita el usuario, mas no como se cree que necesita.
Mi compañero de grupo realizó el diseño mecánico e impresión 3D de la mano robótica, mientras que yo realicé el diseño electrónico y la programación en Arduino de este.
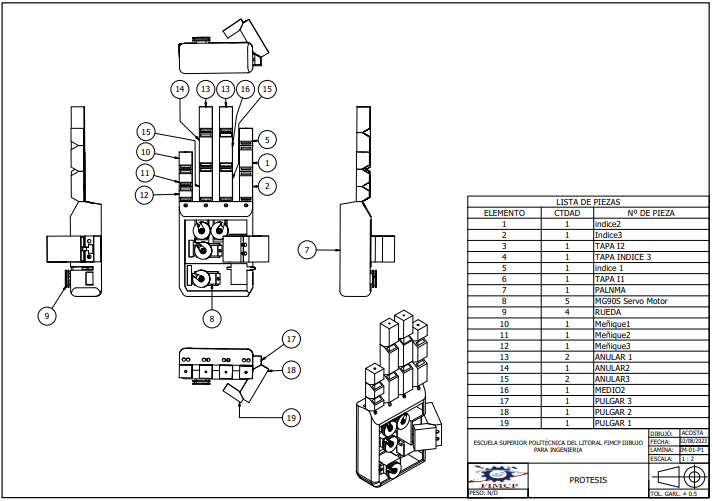
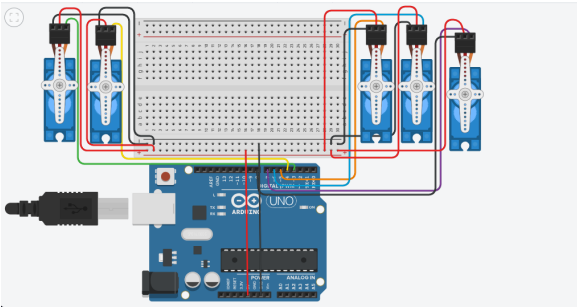
El diseño mecánico se hizo a través del programa de diseño 3D Autodesk Inventor, y el diseño electrónico se hizo con Autodesk TinkerCad usando también el IDE de Arduino para sus pruebas en tiempo real.
Durante el diseño y ensamble de la prótesis nos surgieron algunos problemas, como la ideación del mecanismo que moverá los dedos de la mano cerrándolos y abriéndolos, qué tipo de sistema embebido nos ayudaría a medir pulsos musculares,
cómo debería moverse la mano, errores de diseño, errores en la comunicación entre los electrodos que medían los pulsos musculares y arduino. Se debe destacar que se usó 5 micro servomotores (uno por dedo) para controlar el movimiento de los dedos.
Así mismo, se usó un sensor de señales musculares Shield EMG para medir los pulsos de movimiento de la mano junto con electrodos.
Sin más que añadir, a continuación se presenta el documento detallado en PDF del proyecto realizado por ambos: Informe PDF.